

j. Perform sampling of final trap weights (under quiescent conditions).
k. Wash sand from the traps' rubber seals into the traps and resample
weights.
l. Conduct a complete posttest beach survey.
Instrumentation and measurement scheme
The LSTF hosts a suite of instrumentation. Details on the capabilities and
accuracy of the instruments are described in previous chapters (see Chapters 2
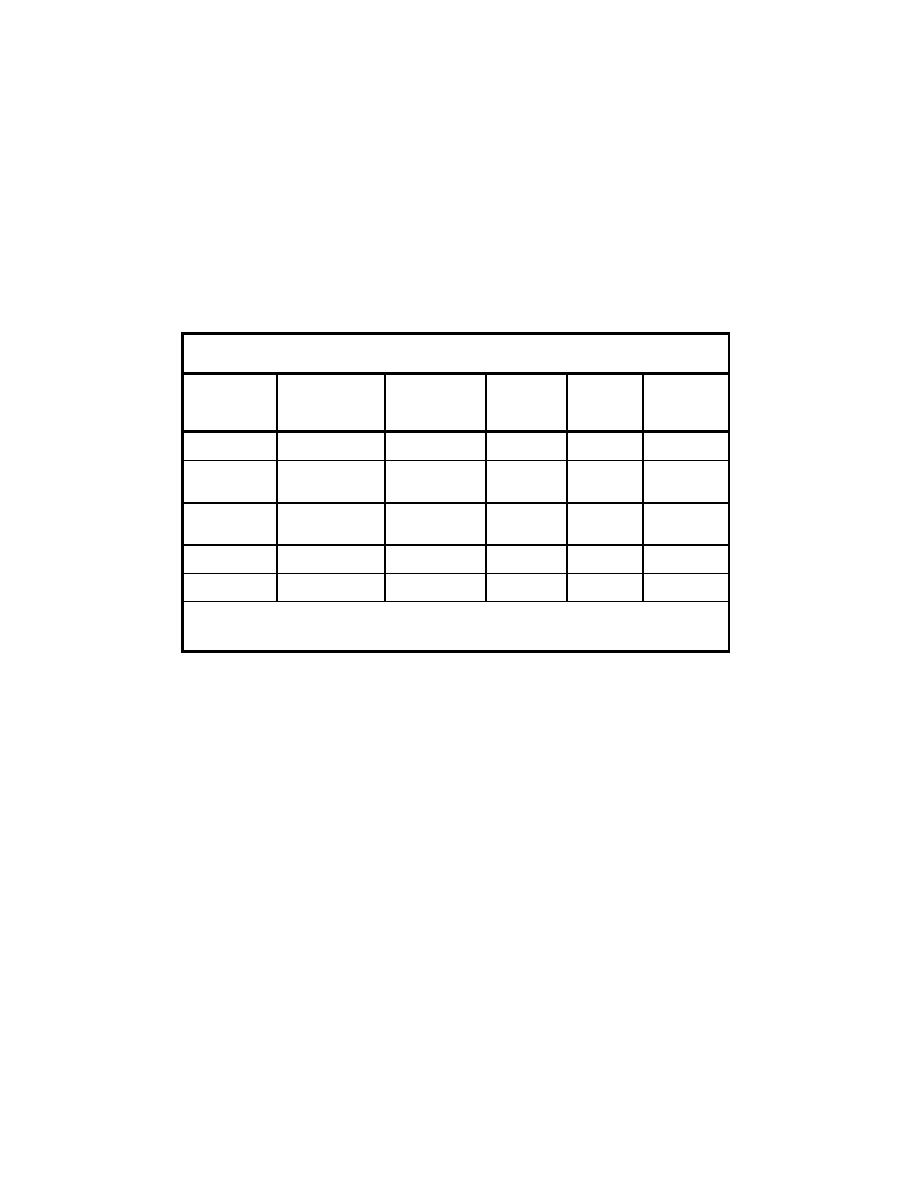
and 8). A brief summary of the instrumentation and sampling scheme specific to
the LST experiments is listed in Table 5.
Table 5
Instrumentation and Sampling Scheme
Number
of Cross-
Parameter to
Instrument
Sampling
shore
Vertical
Sampling Rate
Locations
be Measured
Type
Duration
Profile
1
Waves
20 Hz
10 min
10
N/A
Wave Sensor
2
Current
Velocimeter
20 Hz
10 min
10
Yes
(ADV)
Fiber-Optic
Sediment
Backscatter
16 Hz
10 min
7
Yes
Concentration
(FOBS)
Bottom-tracking
Water Depth
Every 5 mm
Continuous
3,660
N/A
Profiler
Bottom
Mode 1: 4 Hz
Continuous
20
No
Sediment Flux
Sediment Traps
Mode 2: 1 Hz
1 min
20
No
1
The 10 locations were 1.1, 2.7, 4.1, 5.7, 7.1, 8.5, 10.1, 11.6, 13.1, 15.6 m from the shoreline.
2
The ADVs were positioned at the same cross-shore locations as, and synchronized with, the wave
sensors
Sediment flux measurements using the downdrift bottom traps were
conducted in two modes. Mode 1 consisted of continuous sampling of trap
weight at a high frequency, 4 Hz, during the test segment. However, accurate
weight measurements during the wave run were not possible due to vibration and
movement of the traps, which were forced by the wave motion. Measured
weights exhibited considerable "noise," but increasing trends were identifiable.
Mode 2 trap measurements consisted of two discrete sampling periods, at 1 Hz,
before and after the wave run. Accurate trap weights were obtained in quiescent
water.
Wave and current measurements were synchronized, allowing computation
of directional wave spectra. However, estimation of breaking wave angle from
the spectra was difficult, and calculations had a high degree of uncertainty.
Breaker angle also was measured visually using the digital compass in an
electronic total station transit. About 20 breaker angles were measured during
each test segment. An overall average for all the test segments for each wave
condition was used to estimate the breaker angle. Elevations of the FOBS
sensors are referenced to the bottom sensor, which is deployed directly on the
sand bed. The bottom sensor is identified as the one having saturated signals.
125
Chapter 10
Longshore Sediment Transport Experiments

 Previous Page
Previous Page
